




韶鋼智能(néng)一鍵澆鋼平台的成功上線(xiàn),是連鑄生産(chǎn)邁向高度無人化新(xīn)階段的重要标志(zhì)。該平台通過融合頂尖的3D視覺技(jì )術,不僅為(wèi)連鑄環節賦予了“智慧之眼”,使其能(néng)夠更加精(jīng)準、高效地運作(zuò),更在多(duō)樣化場景中(zhōng)展現了鐳目智眸3D視覺技(jì )術的廣泛适用(yòng)性。這一創新(xīn)性的技(jì )術集成,不僅提升了生産(chǎn)效率與質(zhì)量,還在更深層次上加速了工(gōng)業智能(néng)化的發展步伐,為(wèi)整個行業的轉型升級注入了強大的動力。
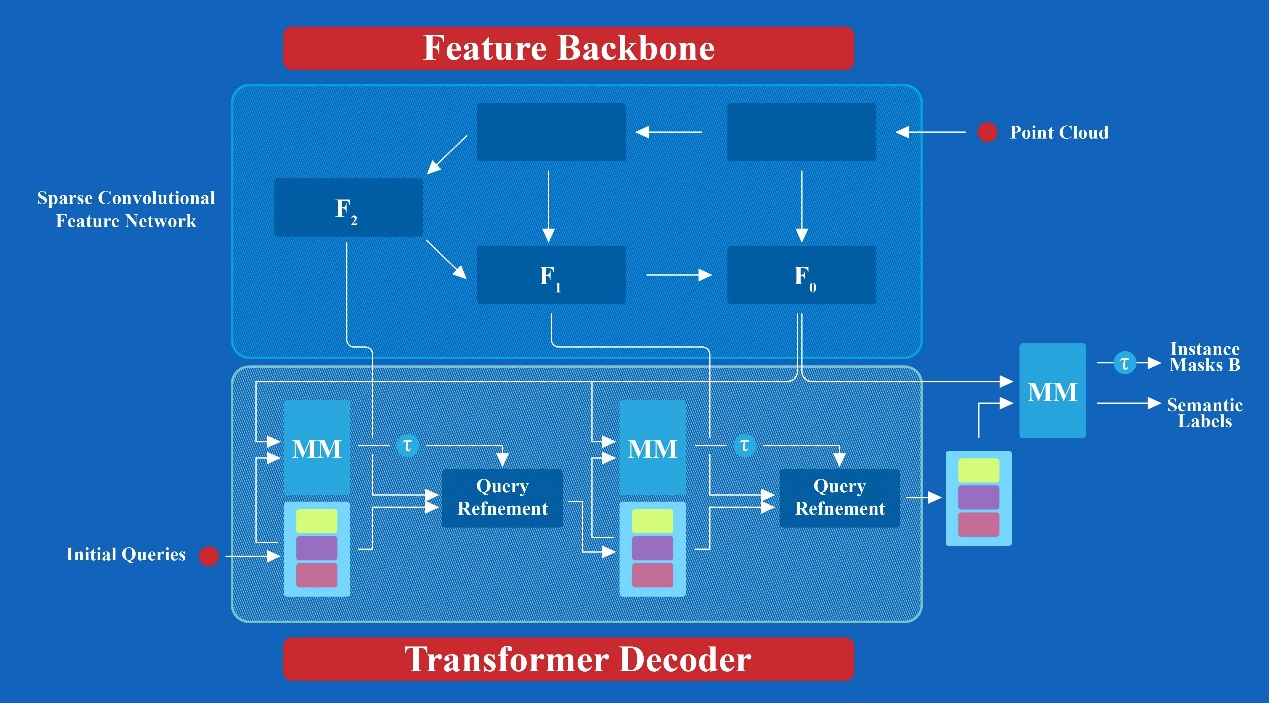
在鋼鐵生産(chǎn)環境中(zhōng),3D視覺技(jì )術的實際應用(yòng)能(néng)力常受限于現場條件、識别速度及識别精(jīng)度。為(wèi)了突破這些限制,提升識别速度,鐳目智眸3D視覺團隊深入優化了特征骨幹網絡(Feature Backbone)。在單一場景下,通過dropout犧牲部分(fēn)參數,并采用(yòng)稀疏卷積(Sparse convolutional)的方式提升算法性能(néng)。同時,為(wèi)了增強3D檢測的精(jīng)确度,引入了transformer結構的編碼器機制,通過叠代細化實例查詢,使用(yòng)交叉注意力機制處理(lǐ)點特征,并由這些特征來引導實例查詢。在該方法下,3D視覺識别速度提高了10%,精(jīng)度提升了3%以上,從而為(wèi)連鑄工(gōng)藝的具(jù)體(tǐ)應用(yòng)提供了堅實的技(jì )術支持。
在多(duō)個關鍵環節,如脫鈎檢測、油缸的高精(jīng)度識别與定位、水口架定位、水口識别及定位、覆蓋劑的定位與分(fēn)揀,以及中(zhōng)包車(chē)的對中(zhōng)與定位等,鐳目智眸的機器視覺團隊利用(yòng)2D與3D視覺的協同作(zuò)用(yòng),實現了準确、迅速且穩定的識别功能(néng)。這一技(jì )術革新(xīn)有(yǒu)效地指導了機械臂和自動化設備對上述重要工(gōng)藝進行全自動操作(zuò)與控制。
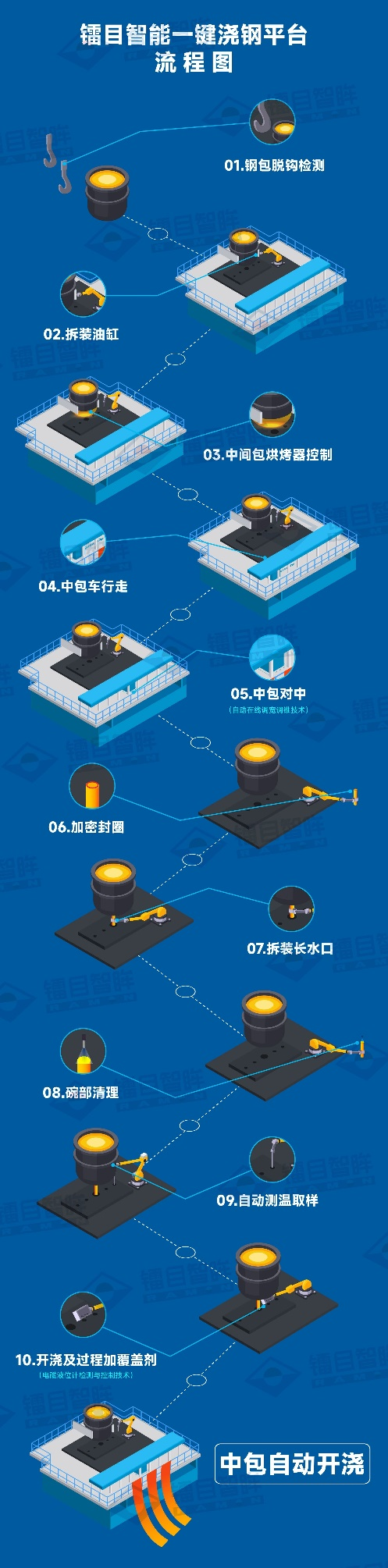
△ 鐳目智能(néng)一鍵澆鋼平台流程圖
韶鋼智能(néng)一鍵澆鋼系統為(wèi)實現從鋼包脫鈎至中(zhōng)包順利開澆的全程自動化控制,已在逾11個關鍵環節引入了先進的自動化設備與智能(néng)算法。該系統深度融合了機器視覺、精(jīng)準的機器人控制以及高效的核心邏輯算法,構建了一個三維的智能(néng)化體(tǐ)系,最終實現了真正的“一鍵澆鋼”,大幅提升了連鑄生産(chǎn)的智能(néng)化水平。(謝(xiè)娜)